Hoje estive a fazer as ligações e a testar a nova placa para o braço robótico RAMK2P. Usei uma placa perfurada de lado duplo e como não estou habituada a elas acho que fiz um mau trabalho. Tive que ir duas vezes ao ferro de soldar corrigir problemas. No final o braço robótico ficou a trabalhar conforme estava anteriormente.
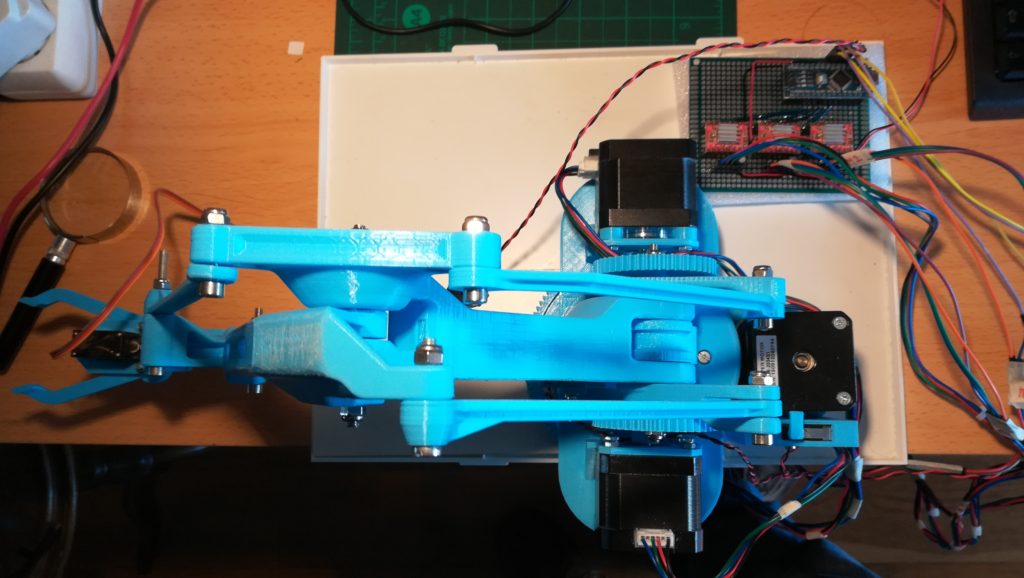
A placa está ainda incompleta pois não tem a ligação para o servo motor da garra nem a sua alimentação independente. Só estou a prever completar a placa mais tarde. Antes de a completar estou a pensar dedicar um tempo a desenvolver o software para usar este braço com o ROS, entre o qual um node com o hardware interface usável com o ros control.