Terminei agora a primeira fase da placa perfurada para servir de suporte à electrónica de controlo para o braço robótico Robotic Arm MK2 Plus, que é uma versão impressa em 3D do eezyBotArm Mk2 modificada para motores de passo NEMA 17, e que por vezes por conveniência designo pelo seu acrónimo RAMK2P.
Como melhoramento face ao original desenvolvi um sistema para posicionamento automático das hastes na inicialização, que se pode-se adaptar ao braço original, e um pequeno firmware para o Arduino que permite explorar o braço no ROS.
Os testes iniciais e o desenvolvimento da primeira versão do firmware para o ROS foi feita com uma placa de testes e já estava farto de tanto fio.
Durante as experiências que fiz queimei um dos drivers A4988 e só agora, um mês depois retomei o projecto.
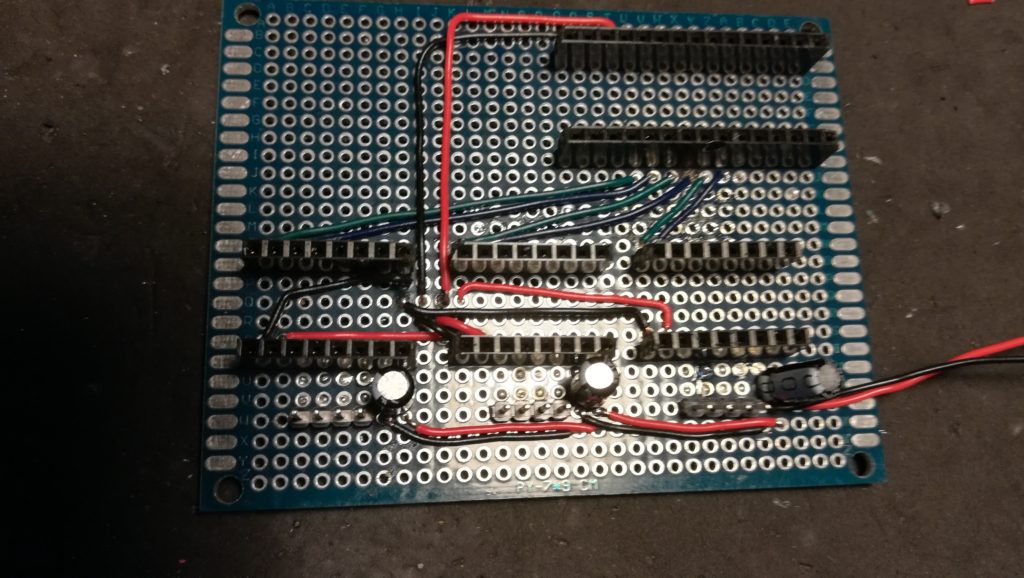
Na placa ainda não estão contempladas a ligação, nem a alimentação, motor servo MG90 usado como actuador na garra do braço.