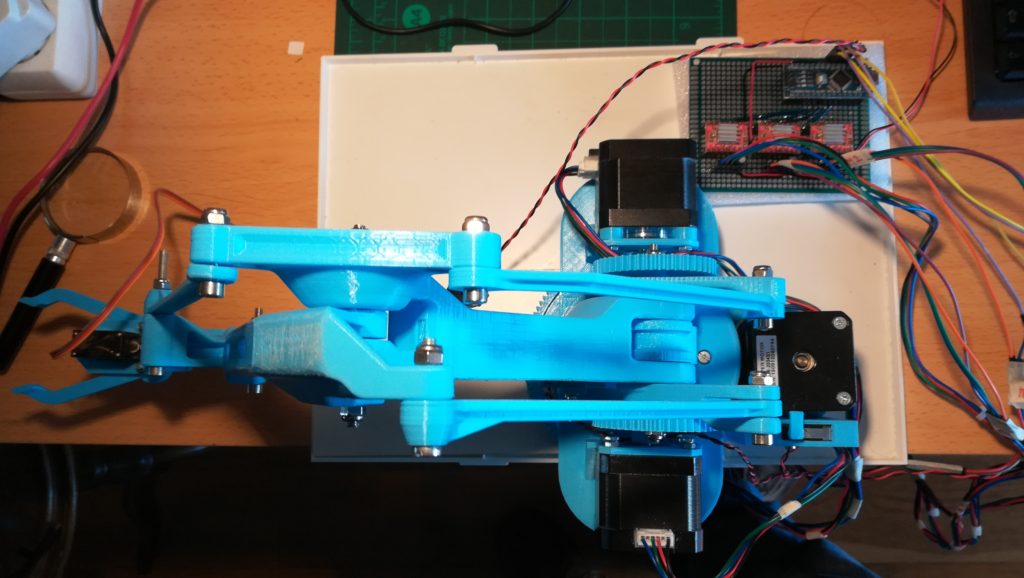
Tenho andado de volta do controlo do braço robótico eezybotarm mk2 com o ros moveit, e até agora não tinha tido muito sucesso em controlar a rotação do braço sobre o eixo z (posição no eixo y). Apenas conseguia posicionar a ponta do braço robótico mais perto ou mais longe da base (posição no eixo x) ou mais alto ou mais baixo face á superfície (posição no eixo x).
Finalmente consegui. A diferença fundamental foi a escolha do LMA kinematics plugin como kinematic solver, para o arm planing group durante a configuração do braço efectuada no Moveit Setup Assistant.